Mechanics
Mechanical Design
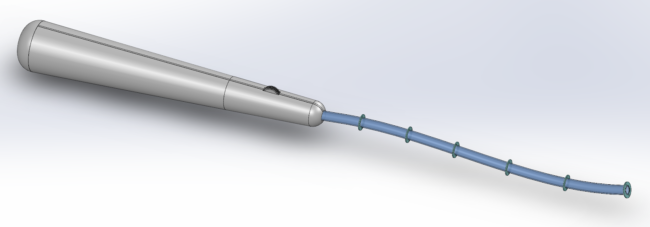
Fig. 1: Overall Low Resource Bronchoscope Design
Insertion Tube

Fig. 2: Insertion Tube Schematic
The insertion tube consists of a central instrument channel to collect samples surrounded by bending discs. The disc at the end of the tube includes a slot for the camera. Wires running through these discs are controlled by a mechanism in the handle to angulate the insertion tube, allowing for navigation of the airways.
Variable rigidity of the instrument channel materials will allow for structural integrity at the proximal end and flexible angulation at the distal end. Bending disc material will most likely be ABS. Angulation wire material should be durable and flexible.
Mechanical Design Option #1
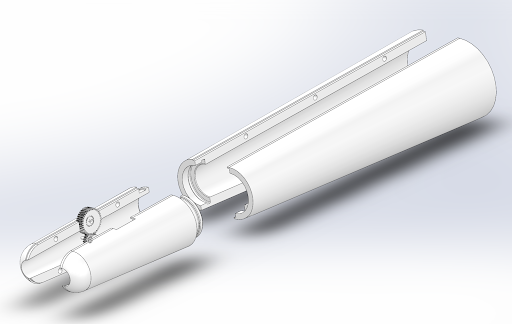
Fig. 3: Main Body of Design Option #1
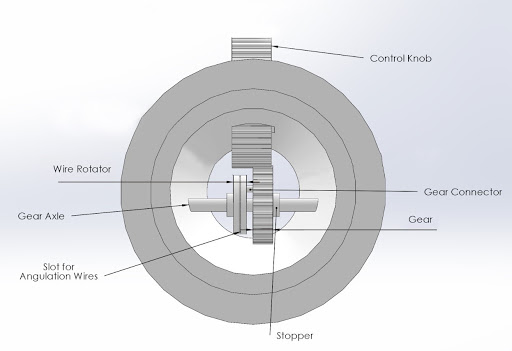
Fig. 4: Mechanical Control Design Option #1
The first mechanical design option consists of a stationary main body and rotational end piece that both split in half and are able to reconnect using pegs and holes for easy assembly and repair. Rotation of the end piece allows for 360° rotation of insertion tube. An external control knob rotates gear to move wire rotator, pulling wires in opposite directions to angulate the insertion tube.
An issue with the current design is that most 3D printers do not have a high enough resolution to create the small intricacies of the internal parts. The internal parts should consist of an affordable, durable material to reduce wear. In the case that these parts break, spare internal parts should be provided with the device. Main body material will most likely be ABS. To account for potential failure, the body should be tested to ensure long-term durability.
Mechanical Design Option #2
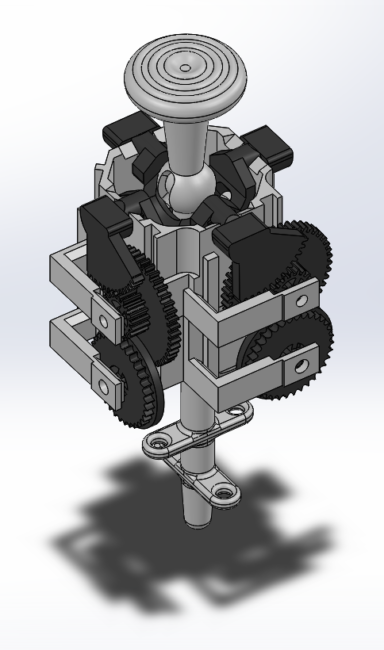
Fig. 5: Mechanical Control Design Option #2
The second mechanical design option allows for 2-axis control and was based off of an open source CAD design of a Nintendo 64 controller joystick. The joystick controls 2 gearing mechanisms which operate the angulation wires along the insertion tube in both axes of translation. Step-up gearing ensures amplification of input control.
Several potential flaws with this design exist. First, the potential for range of motion using this design is lower than the other. In addition, in the current iteration of the design, the mechanism lacks wire guides, leading to slippage and potential for tangled wires. To account for potential failure, the system should be tested to ensure long-term durability.