MERLIN
MRI-Enabled Robotic non-Linear Incisionless Neurosurgery
Curing Epilepsy with a Needle VIDEO
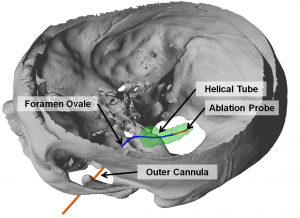 The research goal is to create a robotic system that is compatible with the intense magnetic fields of a Magnetic Resonance Imaging (MRI) scanner. This system has exciting potential to transform neurosurgery from traumatic open surgical procedures, to minimally-invasive, MRI-guided interventions. The imaging technology of choice for neurosurgery is MRI, yet conventional robots powered by DC motors cannot operate inside the scanner’s magnet. We are developing a small, fully non-magnetic robot that can safely go with the patient inside the magnet to deliver needle-based therapy under MRI guidance. Our MRI-compatible robotic system steers a needle-sized, tentacle-like robot deep into the brain and offers a promising alternative to open brain surgeries.
The research goal is to create a robotic system that is compatible with the intense magnetic fields of a Magnetic Resonance Imaging (MRI) scanner. This system has exciting potential to transform neurosurgery from traumatic open surgical procedures, to minimally-invasive, MRI-guided interventions. The imaging technology of choice for neurosurgery is MRI, yet conventional robots powered by DC motors cannot operate inside the scanner’s magnet. We are developing a small, fully non-magnetic robot that can safely go with the patient inside the magnet to deliver needle-based therapy under MRI guidance. Our MRI-compatible robotic system steers a needle-sized, tentacle-like robot deep into the brain and offers a promising alternative to open brain surgeries.
Related External Blog Posts
Brain Surgery Through The Cheek
Researchers Develop Fully Pneumatic Neurosurgical Robot
Mechanical Engineers Create First Fully Pneumatic Robot for Neurosurgical Interventions
CCEFP update: Additive manufacturing creates MRI-compatible pneumatic actuators
Journal Publications
- D.B. Comber, E.J. Barth, and R.J. Webster III. “Design and Control of a Magnetic Resonance Compatible Precision Pneumatic Active Cannula Robot,” ASME J Medical Devices, 8(2):011003-1 to 011003-7, 2014. PDF
- J. Ueda, D.B. Comber, J. Slightam, M. Turkseven, V. Gervasi, R.J. Webster III, and E.J. Barth. “MRI-Compatible Fluid-Powered Medical Devices,” ASME Dynamic Systems & Control Magazine, 1(2):13-17, June 2013. PDF
- D.B. Comber, D. Cardona, R.J. Webster III, and E.J. Barth. “Precision Pneumatic Robot for MRI-Guided Neurosurgery,” ASME J Medical Devices, 6(1):017587-1, 2012. PDF
Conference Publications
- D.B. Comber, J.E. Slightam, V.R. Gervasi, R.J. Webster III, and E.J. Barth. “Design and Precision Control of an MR-Compatible Flexible Fluidic Actuator,” Proc ASME/Bath Symposium on Fluid Power & Motion Control, Sarasota, FL, 2013. PDF
- D.B. Comber, R.J. Webster III, and E.J. Barth. “Open-Loop Tip Accuracy of an MRI-Compatible Active Cannula Robot,” Hamlyn Symposium on Medical Robotics, Royal Academy of Engineering, London, UK, 2013 PDF
- D.B. Comber, D. Cardona, R.J. Webster III, and E.J. Barth. “Sliding Mode Control of an MRI-compatible Pneumatically Actuated Robot,” Proc Bath/ASME Symp Fluid Power & Motion Control, pp. 283-293, University of Bath, Bath, UK, 2012. PDF
- D. Comber and E.J. Barth. “Precision Position Tracking of MR-Compatible Pneumatic Piston-Cylinder Using Sliding Model Control,” Proc Bath/ASME Symp Fluid Power & Motion Control, pp. 1-7, Arlington, VA, 2011. PDF