PID Final Validation in Servo Construct
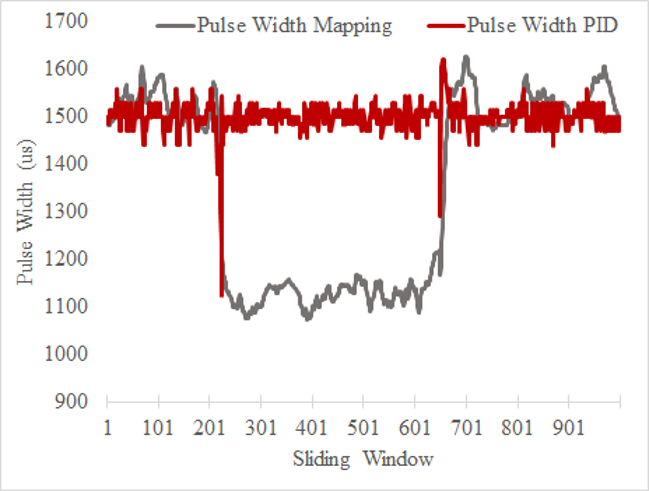
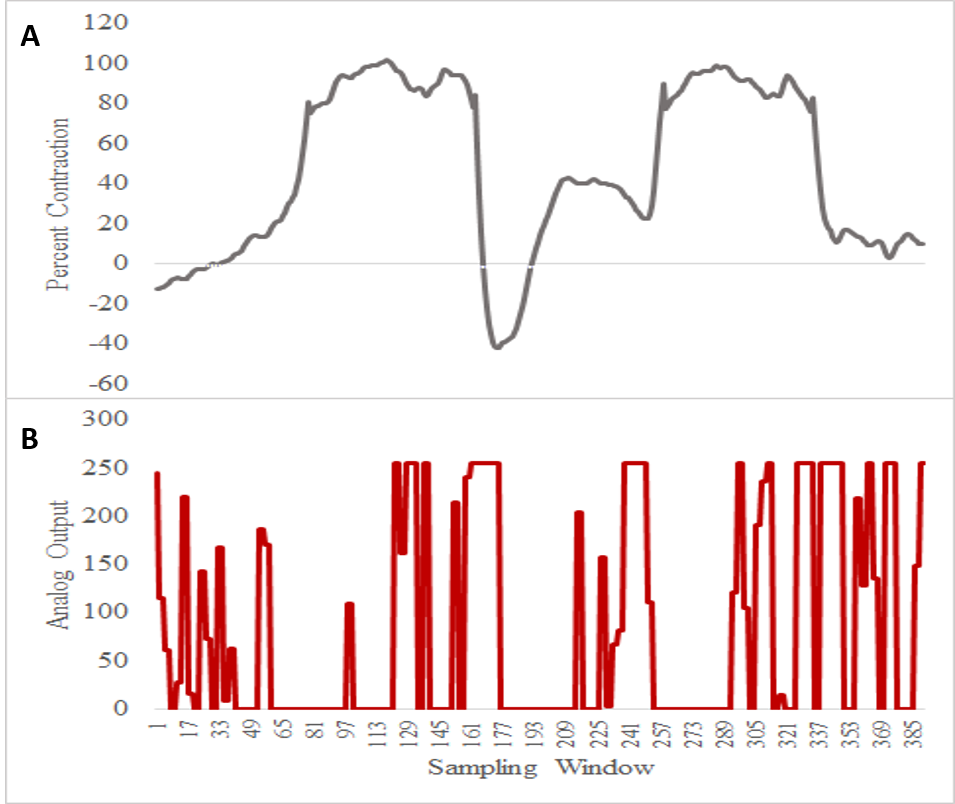
Because of the differences in state seen between the prosthesis and the servo motor used as a proof of concept, two distinct PIDs were constructed for clinical use and for servo validation. The intial PID was formed based on pre-existing arduino libraries, but the analog output, did not translate as smoothly as our matlab model did when the PID was formed manually (Bottom image). Therefore, the PID was constructed manually within the code to produce the results shown in the top image. The entirely differential-controlled PID was able to successful bring the maintained pulse-width output of the PID back down to the set point over the period of contraction shown, as was hoped.