
Alex Boyd, Myron Mageswaran, Maggie Ford
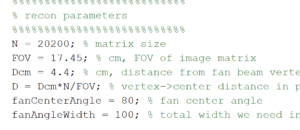
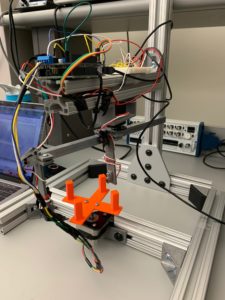
This week the group refined the cable management and secured the arduino and breadboard to the scanner frame (shown below). The group also increased the fan angle to now sweep 100 degrees in order to image the entire phantom. The position of the stepper motor and servo are now being read by MATLAB and being placed in individual vectors for interpretation by the image reconstruction script. Lastly, the image reconstruction script parameters were set by the group. The students still need to set the inputs to the final image creation function but the initial parameters have been set as seen below.
Input Parameters for Reconstruction
Refined Cable Management
Question: What parameters of your scanner and scan method influence resolution? Investigate these.
- The size of the servo step between reads influences resolution as well as the distance between the photodiode and IR LED because this changes the focus by changing the scatter angles that are read by the system.
Question: What is the smallest feature or line pair that you can resolve?
- The actual smallest feature we can resolve will be found (and this answered again next week) when an image is constructed but the resolution will be limited by those factors mentioned in the above question such as servo step size and the size of the focal point of the photodiode.