
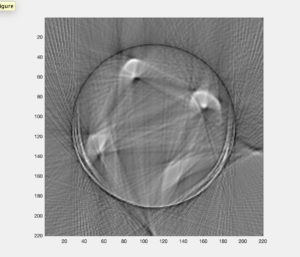
This week the group imaged a new phantom and tested changes to the image reconstruction parameters. Ultimately the tweaking of parameters led the group back to their original inputs as shown in the week 4 blog post. The baud rate was also adjusted to 14400 to smooth the motion of the servo motor but no improvement was noticed in image quality. Attached below is the new phantom and resulting image output. The larger phantom caused issues with resolving the image closer to the edges of the field of view and resulted in blurrier imaging of the posts that in prior phantoms which were smaller and more centrally concentrated.
Fig 1.The new phantom to be imaged
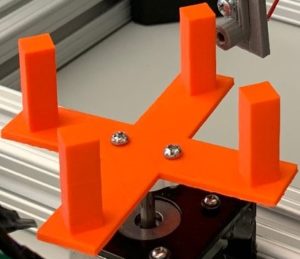
Fig 2. The resulting IR CT image of the new phantom
Question:
What happens if you more coarsely or finely sample the stepper motor position?
The increase in number of polar steps from moving the stepper more finely results in a higher resolution image with more data points. If moved more coarsely then the resultant image has fewer data points collected and therefore a lower power to resolve small objects.