Alex Boyd, Myron Mageswaran, Maggie Ford
This week the group began prep work for the Ultrasound scanner. This started by creating a graphite coating on a 3D printed phantom to later be imaged. The group also soldered elements to a PCB for the T/R switch to be used by the scanner. Part of the circuit used is displayed below with the switching diodes arrangement shown in the physical PCB picture. The L and C values for the T/R switch were solved for using these formulas with 5MHz for f0 and 50 Ohms for Z0: L = Z0/(2πf0), C = 1/(2πf0Z0). The group also began calibration of the T/R switch for effective measurement of ultrasound waves when the device is complete, but did not complete the calibration steps.
Figure 1. The transmit/receive switch circuit schematic section with inductors and capacitors
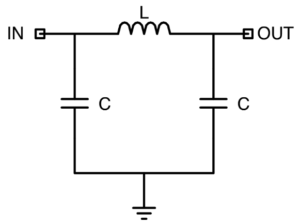
Figure 2. The transmit/receive switch PCB with elements soldered and switching diodes shown.

Question: What values do you get for L and C?
The resulting values were L = 1.59*10^-6 H and C = 636.7 pF which were then rounded to the nearest physical elements available.