Blog Post Week #2: Imaging Instrumentation Ultrasound Lab
Jorie Budzikowski, Stephanie Molitor, and Rachel Welscott
(overheard) QUOTE OF THE WEEK:
“Everything is a learning experience”
This week we worked on:
- Measuring the return loss of our T/R switch
- Characterizing the signals for different inputs/outputs of our T/R switch
- Making a 5 MHz function generator on Ubuntu
Measuring the return loss of our T/R switch
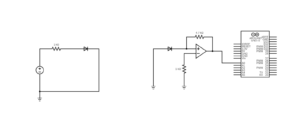
After soldering our T/R switch last week, we needed to verify that it is functioning properly. We did this by measuring the return loss at different ports. We injected a low amplitude, 5 MHz, voltage signal into our switch via the AIM radio, which then also read the signal that was reflected back to it. If all of the signal is reflected, we would get a return loss of 0. When we injected the signal into the Transmit port, we saw a very small return, which indicates that no signal was transmitted. This was expected because a low amplitude voltage should not be enough to turn on the diodes and transmit the signal. When we injected the signal into the Probe port (as if we were reading a signal from the US probe), however, we saw a significant return loss, which means that some of our signal was actually being transmitted to the receiver. These return loss measurements are illustrated in figures 1-5 below.
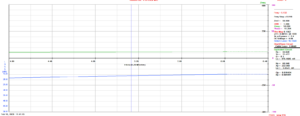
Figure 1. Return loss: antenna connected to TX out, nothing on TX in, 50 ohms on Rx OUT OF BOX
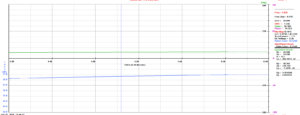
Figure 2. Return loss: antenna connected to Tx out, 50 ohms on Tx in and 50 ohms on Rx OUT OF BOX
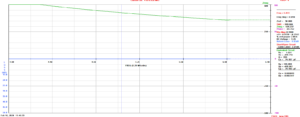
Figure 3. Return loss: antenna connected to Tx in, 50 ohms on Tx and Rx, OUT OF BOX
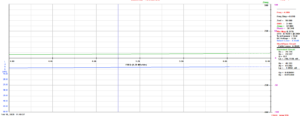
Figure 4. Return loss: antenna connected to Tx out, 50 ohms on Tx in and 50 ohms on Rx IN THE BOX
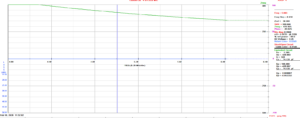
Figure 5. Return loss: antenna connected to Tx in, 50 ohms on Tx and Rx, IN THE BOX
Characterizing the signals for different inputs/outputs of our T/R switch
Once we were able to verify that our return loss values matched or expectations, we were also able to characterize our signal with different input/output connections. Using the same AIM radio as a low amplitude, 5 MHz voltage generator, we were able to inject a signal into our T/R switch, and then read the output on an oscilloscope. When we injected the signal into the Transmit port, and measured the signal at the Probe port (with the Receive port loaded with 50 Ohms) we saw a negligible signal, with a peak-to-peak amplitude of 10 mV. This was expected because the low amplitude voltage should not be enough to turn on the diodes and transmit the signal. When we injected the signal into the Probe port, and measured the signal at the Receive port (with the Transmit port loaded with 50 Ohms), we got a signal with a 230 mV peak-to-peak amplitude, which indicates that we are able to measure the signal that would come in from the US probe. The signals received on the oscilloscope are captured in figures 6 and 7 below.
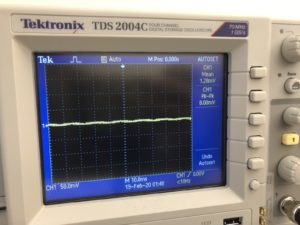
Figure 6. Oscilloscope at Tx out, antenna at Tx in, 50 at Rx, p2p amp =10 mV antenna at Tx out, oscilloscope at Tx in, 50 at Rx, p2p amp = 6 mV
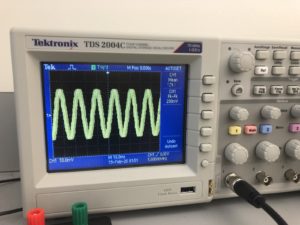
Figure 7. Oscilloscope signal at Rx, antenna at Tx out, 50 at Tx in, p2p amp =230 mV 0 attenuation when device is plugged in.
Creating a 5 MHz function Generator on Ubuntu
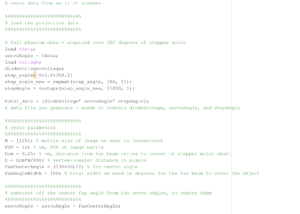
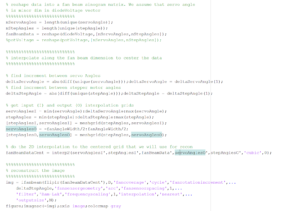
Since our AIM radio is limited to only producing low amplitude signals, we needed to create a function generator to transmit a larger signal to the US probe. We were able to create a simple 5 MHz signal using GNU Radio Companion supported by Ubuntu, that we sent through the USRP1 Software Defined Radio and measured with an oscilloscope. The code that was used and the images that were collected can be seen in figures 8-12 below.
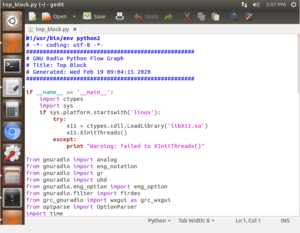
Figure 8
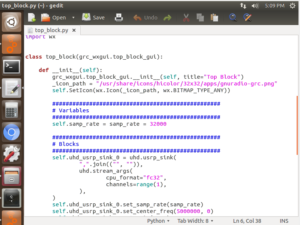
Figure 9
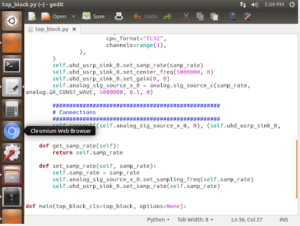
Figure 10
Figures 8-10. The top block Python code generated when the function generator was compiled.
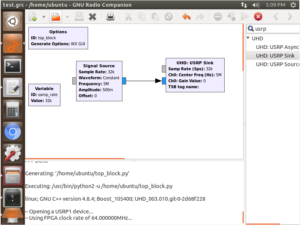
Figure 11
Figure 11. The block diagram of 5MHz function generator with a 500 mV amplitude.
Questions to answer this week:
- Question: Under what conditions do each pair of crossed diodes turn on?
- Both pairs of diodes turn on under large voltage pulses from the transmitter. Neither pair of diodes is turned on in between the large voltage pulses.