Week 8 Blog Post: Ultrasound Scanner
Hunter Spivey and Aayush Gupta
This week we began to test the T/R switch using our antenna analyzer but were running into issues with return loss measurements. Our return loss measurements were for the most part as expected, with us getting a return loss of zero when sending signal into the TX in port. However, our return loss when sending signal into the RX port was only about 3 dB whereas we had been expecting about 10 dB. We attempted to solder the components onto the board better, but this made little difference and we were still only getting about 6 dB. After struggling with this, replacing our inductor, and still getting only 6 dB, we recalibrated our antenna analyzer program and were finally able to get the 10 dB return loss we expected. Now with confirmation that our T/R switch was indeed working as we expected, we moved on and began setting up our GNU radio software. Unfortunately we ran out of time before we could get very far with our software though, and were only able to get it started and run through some basic tutorials.
We next hope to finish the GNU radio software provided coronavirus doesn’t do us all in/we even have class anymore?
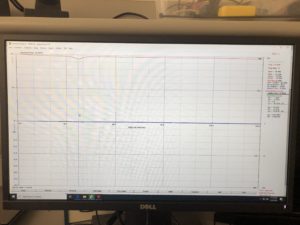
Return Loss of TX in:
Question: How close can you get to these values (L and C) with the components we have (without, e.g. using multiple components in each position)?
Answer: We can use a 1.5 microHenri inductor and two 680 picoFarad capacitors