
















Over the course of the past two weeks, we have progressed in the three following areas:
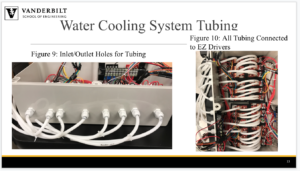
In order to accurately and precisely send flow media with our motor system, we had to have an optimized tubing length. Since each motor may not have the a flow sensor, it is also important that each motor is constructed in the exact same way, so that the flow is still reliable. This will largely be due to the tubing length that wraps around the motor head. We determined this length to be 85 millimeters. This length provides a high amount of tension, meaning that peristaltic flow can easily be induced with our motor system.
2. The code
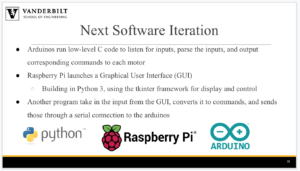
Data will be transferred between Arduinos and the Raspberry Pi using a custom struct data structure. This struct will contain information about how the motors must move when ordered. A second custom data structure may be used to send data back to the Raspberry Pi, but this is a secondary priority. The structs will be passed back and forth along the serial connection between the components.
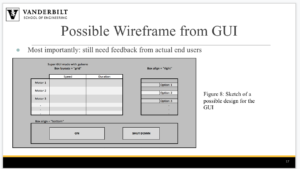
3. The survey for end users
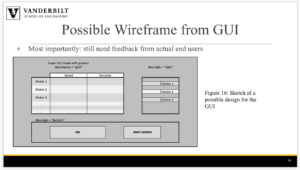
Lastly, we are working on the design of the graphical user interface (GUI). Since we will ultimately not be the end users of this pump system, we wanted to get feedback from some of the people in the Bellan Lab who will be using our design. We want to know what metrics will be most important for them to monitor, and what will be the best way to organize the information in an easy to understand way. The best way to do this was to start constructing a short survey that the users will fill out, so that we can get some preliminary ideas.