Update #6: Week of February 10
This week, we primarily worked on our pump and air bladder compression system, soft potentiometer limb volume measurements, and building a holder for our pulse oximeter. We also brainstormed how to integrate all our components together by making a control diagram and beginning to write pseudo Arduino code.
Compression:
This week, we interfaced servo motors and an Arduino to inflate and deflate our pressure cuff. Below are the servo motors we used, air bladders we inflated, and the automatic pressure cuff we dissembled for our custom use.

Limb Volume:
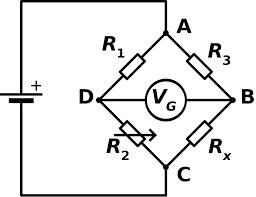
We continued to work with our soft potentiometers. We put soft potentiometers in R3 and Rx, as shown in the circuit schematic below, and 1 kohm resistors in R1 and R2. We used an Arduino to measure the voltage VG across the circuit. Our arduino and breadboard circuit setup is shown below. We attained constant voltage values of 2.5 mV when the soft potentiometers were relaxed, and extremely varying values when teh soft potentiometers were stretched. The values cycled from negative to positive values. We decided not to use the soft potentiometers and instead use rubber conductive bands, which we have ordered, to quantify limb volume.



Wound Perfusion:
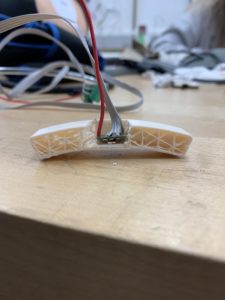
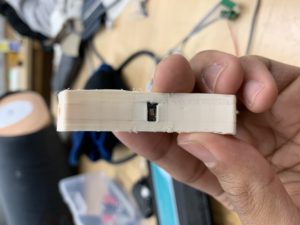
We designed and 3D printed this PLA filament holder for the small spO2
sensor. Our purpose for building this holder was to protect the sensor. Below we show the holder with the pulse oximeter in it and we also show the bottom view of the holder.
Integration
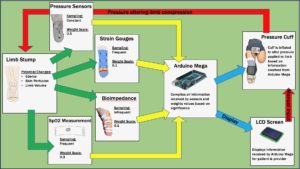
Now, we are beginning to plan how we are integrating our many moving parts of this project. Below is a control system for our edema monitoring and wound healing device. We plan to meet with Dr. Curci, our advisor, to ask him which sensor readings are the highest priority for diagnosing edema and improving wound healing. We also started to write pseudocode for the Arduino Mega that will be the control center of our device. Below is our pseudocode.
Arduino Algorithm
Set Initial Values:
%INPUT VALUES
%pressure determined by provider (TBD values) for 3 air bladders, gradient
SET_pressure_1 = ??
SET_pressure_2 = ??
SET_pressure_3 = ??
%measure value once to set initial
OG_limb_vol = (measured)
%measure SPO2 value to confirm it is working (should be between 94-100)
if(SPO2 > 100)
return error ‘SPO2 not working properly’
end
Inflate the Air Bladders:
%function to inflate air bladders
function fillair {
%turn servo motors while still not fully inflated, using barometers as check
while (barometer1 < SET_pressure_1) {
“servo motor move to ‘open’ code”
}
%close valve when done
“servo motor move to ‘close’ code”
%REPEAT for all 3 bladders
%notify that setup is complete
sleeveOn = true;
}
Maintain Conditions:
%continue to check conditions continuously
while(sleeveOn){
%confirm SPO2 is in proper range
if(SPO2 < 94)
badSPO2 = true;
%check limb volume
if(NOW_limb_volume > OG_limb_volume)
%check in with force sensors
%checking if too high
if(Psensor1 – SET_pressure_1 > 5) { // difference of 5 mmHg, could be different
while (barometer1 > Psensor1)
“servo motor move to ‘release’ code”
}
}
Future work
Next week, we plan to make agar phantoms for testing bioimpedance and limb volume. We also will work on attaining limb volume reading with the rubber stretch sensors and creating a backpack strap to hold the rubber stretch sensors around the limb stump. Finally, we will transform our pseudocode code into Arduino code.