STORM LAB

Medical capsule robots are cm-size mechatronic devices designed to perform medical tasks by entering the human body from natural orifices. At the STORM Lab, we are developing enabling technologies for wireless capsule colonoscopy, and implementing a soft-tethered (and painless) alternative to colonoscopy.
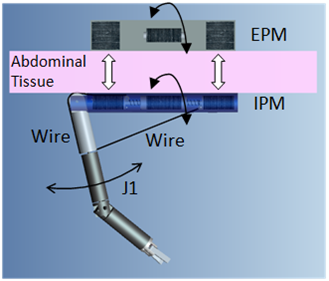
The basic science created to design capsule robots for gastrointestinal endoscopy can be extended to other clinical applications, such as laparoscopic surgery. In this field we aim to harness magnetic fields using novel actuation strategies and models to create a new generation of intelligent surgical-assist devices capable of improving patient quality of life.
Connect with Vanderbilt
©2026 Vanderbilt University · All text, images, videos on this site are protected under United States and International copyright laws, treaties, and conventions. All Rights Reserved. Duplication, modification, or redistribution, in whole or in part, requires explicit permission.
Site Development: University Web Communications