Erdem Erdemir
Trans-Abdominal Active Magnetic Link
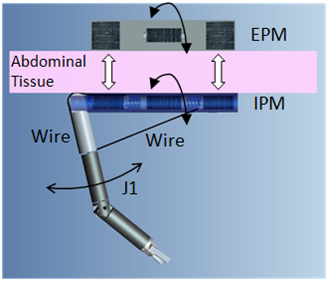
We are studying and developing a novel strategy to operate surgical instruments without the need of dedicated incisions. This approach, if successful, will enable abdominal surgery to be performed robotically through a single 12 mm access, thus improving by far the outcomes of current surgical procedures and paving the way for the next generation of surgical robots. The innovative approach we plan to investigate consists of transferring controlled motion to surgical tools across the body wall using magnetic fields. An external device will change the magnetic field from the outside of the patient’s skin, thereby causing magnetically coupled surgical tools to move inside the body. This novel kind of robotic actuation, where the source of motion is external to the human body, while the part in motion is inside the abdomen, would allow to achieve high dexterity, while minimizing access trauma. Magnetic anchoring of surgical tools will also allow for repositioning the workspace along the four abdominal quadrants without additional incisions.
Connect with Vanderbilt
©2024 Vanderbilt University ·
Site Development: University Web Communications