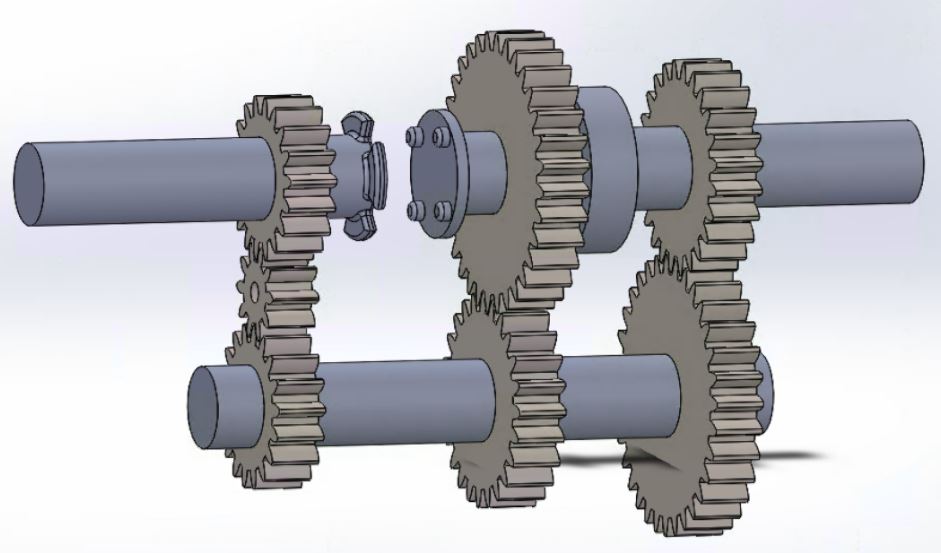
This week we have made our first physical prototype of our gear hub. Our parts were delivered on Tuesday of this week. We created a full catalogue of parts from AndyMark, a company that makes gears primarily for use in robotics competitions. Here is the mock up we have so far.

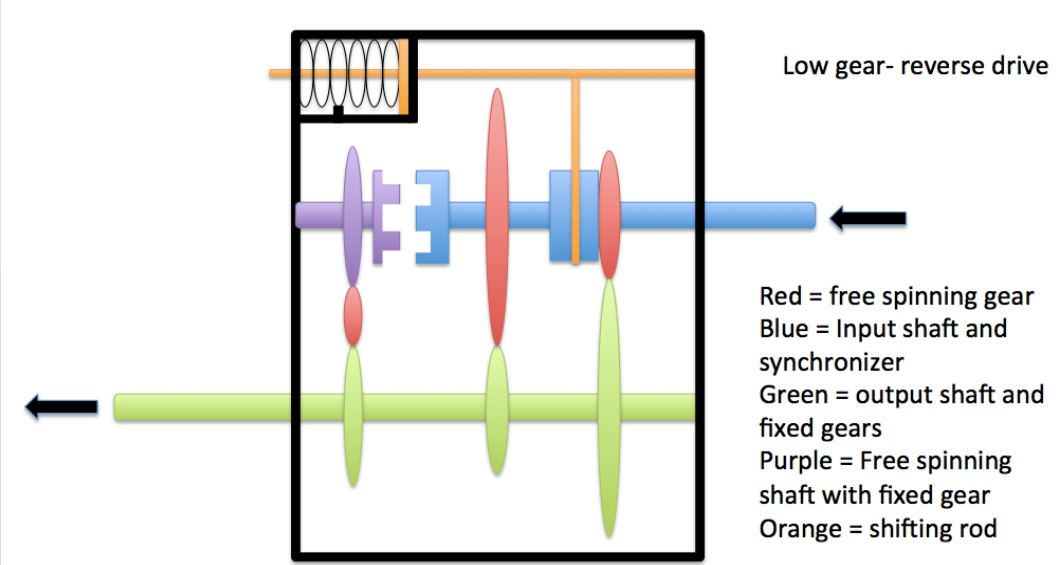
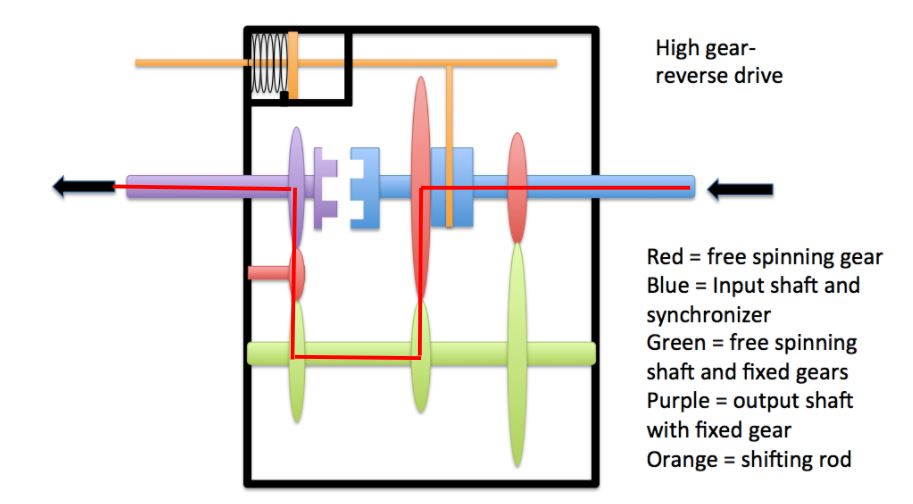
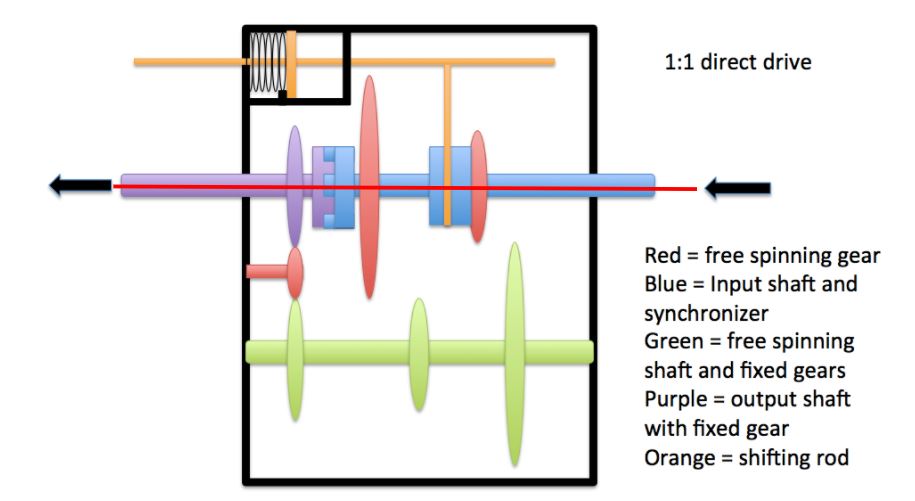
This current prototype can show the demonstration of the hub for reverse low and high gear set ups depending on the position of the dog gear as shown in the image above. For us to demonstrate direct drive, we will need to go to the machine shop to split the top(input/output) axle into two separate components. This way we can slide the axle along its axis and the current sets of gears on the right side will no longer be connected.
We have ordered the required parts needed to do this and set up a consultation at the machine shop to do just this.
We are also considering how we are going to demonstrate the function of this hub on design day. We have acquired a bicycle wheel and are planning to send the half-inch hex axle through the wheel and have a handle on the other side to do a demonstration. A solid works mockup of this is shown below.

The output(left side) of the hub is a half inch hex axle. This will interface directly with the bicycle wheel. The hand rim is shown on the right side. This will all need to be encased in an aluminum hub to maintain structural integrity.
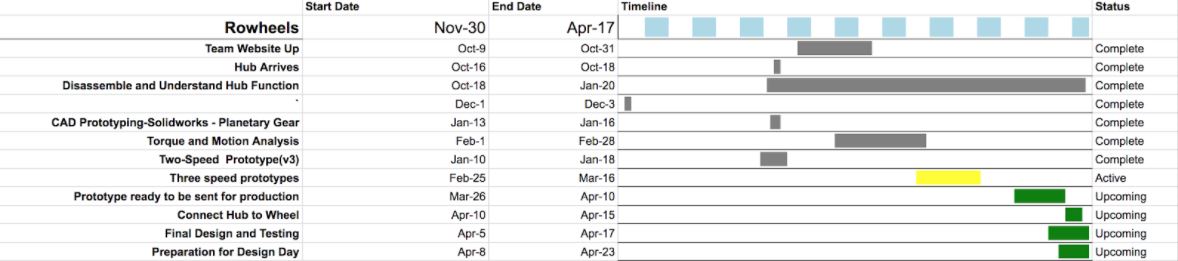
Shown below is where we are in the timeline for this semester.