Through-the-tool tracking for Friction Stir Welding
The purpose of this reseach is to implement automatic seam-tracking for friction stir welding. Research to date
has largely focused on developing systems which can estimate the lateral position of the FSW tool relative to the
weld seam. This position estimator can then be used as a feedback signal in a closed-loop control system to
maintain proper alignment of the weld tool to the seam throughout the weld.
Initial research focuses on two joint types: lap and T (illustrated below)

Research with T-joints has suggested the following conclusions
1) That an estimator of lateral position can be built for T-joints
2) That there is a range of positions around the center of the joint which will produce defect-free welds
These two points indicate that it is likely a controller could be developed which could use the lateral
position estimator to track the weld seam. The presense of a range of lateral positions which produce defect-free
welds allow for a tolerance in the tracking system.
The position estimator uses forces collected during welding to predict lateral position. Shown below is
a plot of estimated lateral positions versus actual tool position relative to the weld seam.
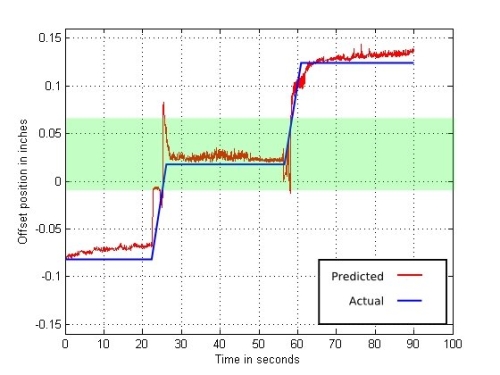
The green region in the above plot indicates the range of welds which do not contain void defects.
Current research is focused on developing the in-process control system for seam-tracking, and for developing
seam-tracking for lap-type welds
Related Publications
P.A. Fleming, D.H. Lammlein, D. M. Wilkes, G.E. Cook and D.A. Hartman.
Joint tracking in friction stir welding
8th International Conference on Trends in Welding Research, Pine Mountain, GA, 2008.
Patents Pending
“LATERAL POSITION DETECTION FOR FRICTION STIR SYSTEMS” U.S. Patent, Notice of Allowance Serial No. 12/703,811; Inventors: P.Fleming, D.Lammlein, G.Cook, D.Wilkes, A.Strauss, D.DeLapp, D.Hartman
Connect with Vanderbilt
©2026 Vanderbilt University ·
Site Development: University Web Communications