VU BreakThru

Home » News » VISE affiliated lab: Computer-Assisted Otologic Surgery (CAOS) – Part II
VISE affiliated lab: Computer-Assisted Otologic Surgery (CAOS) – Part II
Posted by anderc8 on Monday, April 17, 2017 in News, TIPs 2015.
Written By
Neal P. Dillon, PhD (Post-doctoral researcher)
Loris Fichera, PhD (Post-doctoral researcher)
Trevor L. Bruns (PhD Student)
The Computer-Assisted Otologic Surgery (CAOS) lab is a unique collaboration between Vanderbilt University Medical Center and the Vanderbilt School of Engineering. Unlike most engineering labs, the lab is located in the Medical Center just a few floors above the operating rooms, enabling frequent interaction between the research team, surgeons, nurses and audiologists. Researchers get to spend time in the operating room and work closely with medical residents and fellows, helping them to better understand the clinical challenges and improve the development of solutions. CAOS lab director Dr. Robert Labadie, who is a surgeon as well as a biomedical engineering PhD, has established a research program focused on improving otologic surgery by using image-guidance and robotic techniques. Dr. Labadie has worked closely with engineering professors in mechanical engineering, electrical engineering and computer science. Currently, there are five engineering post-doctoral researchers and PhD students in the CAOS lab advised by Robert J. Webster, associate professor of mechanical engineering. These individuals are working on robotic and image-guided devices for otologic surgery, and several of these projects are described below:
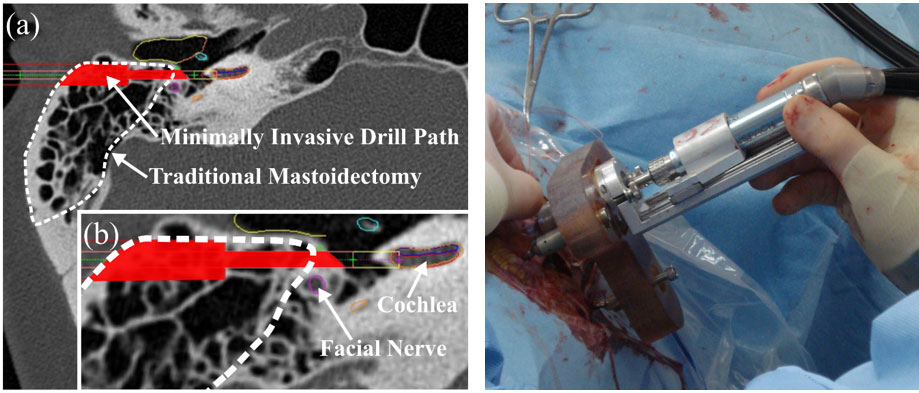
Minimally-Invasive Cochlear Implantation
We have developed an alternative approach to cochlear implantation (CI) surgery. Traditional CI surgery requires a substantial portion of the temporal bone to be milled away to access the middle ear and cochlea. Our approach provides the surgeon direct access to the cochlea through a narrow-drilled tunnel for implant insertion, thereby reducing the invasiveness of the surgery and potentially enabling more candidates to receive a CI. Our method utilizes a patient-specific frame (called a Microtable), which is rapidly manufactured during surgery using data from an intra-operative CT scan. The Microtable is attached to the patient and guides the surgical drill along a safe path from the skull surface to the cochlea, avoiding vital nerves along the way. We have recently received an Investigational Device Exemption from the FDA to test the approach and are preparing to begin a clinical study.
Magnetic Steering of Cochlear Implant Insertion
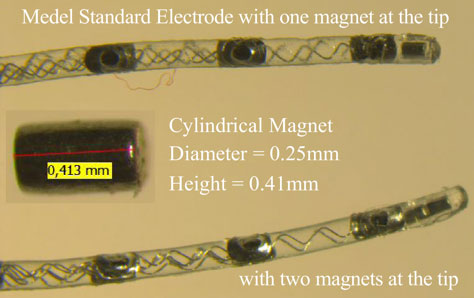
The surgical insertion of a cochlear implant electrode array requires tremendous care and skill to avoid damaging the delicate intracochlear structures. Surgeons must thread the implant down a helical channel using specialized forceps that can only push from the back end. We are developing a system that uses magnetic fields to provide a “virtual hand” capable of steering the tip of the electrode around the turns. This reduces trauma while also allowing more precise placement, leading to better patient outcomes. By combining this technique with a robotic insertion tool and pre-operative imaging, we aim to deliver a system capable of hands-free operation.
Robotic Mastoidectomy
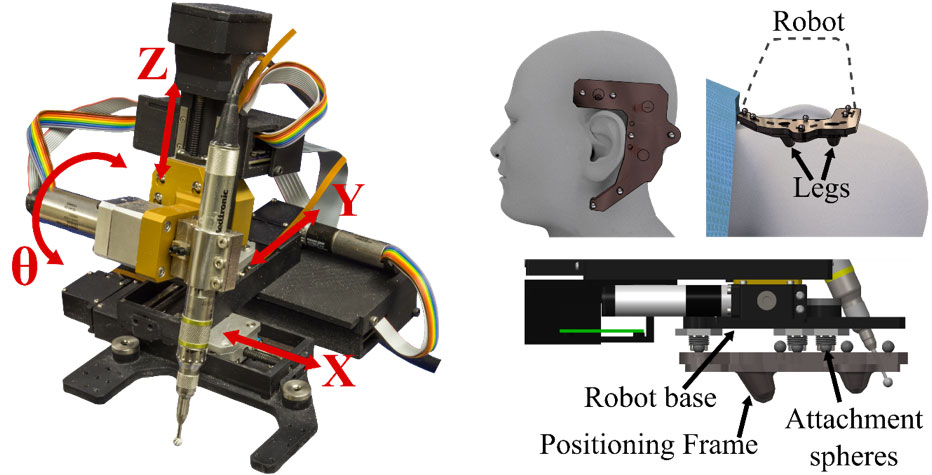
We have developed a compact robot to perform mastoidectomy. Many otologic surgeries begin with a mastoidectomy (removal of a portion of the temporal bone with a high speed surgical drill) to provide access to the underlying anatomy on which the surgeon must operate. Our approach uses a robot for this initial portion of the surgery, with the surgeon completing the more delicate task once the anatomy is accessed (e.g. remove a tumor). Robots are well-suited for surgical tasks like bone milling because of their high accuracy as well as their ability to follow a path specified in the pre-operative medical image.
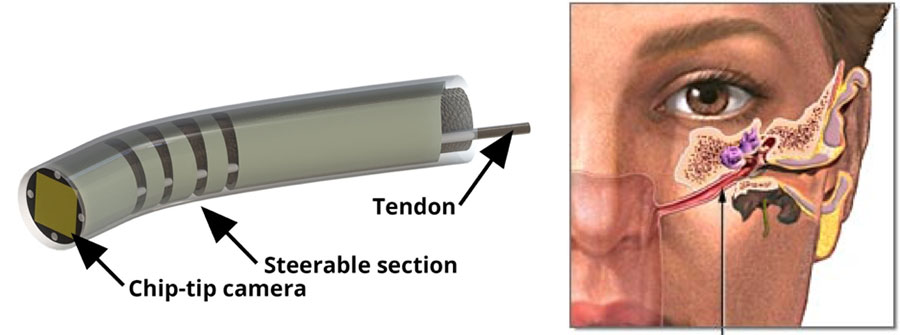
A Miniature Endoscope to See into the Ear
We are building a novel miniature endoscope that is small enough to pass through the nose and the Eustachian Tube to provide visualization inside the ear. The device features a miniature bending tip (diameter = 1.80 mm) that carries and aims a small chip-tip camera and fiber optic light sources. The motivation for trans-Eustachian tube ear inspection is to provide a natural-orifice-based route to the inside of the ear that does not require cutting or lifting the eardrum, as is currently required. We believe that if physicians were able to visualize the inside of the ear without surgery, the diagnosis and surveillance of ear disease would become much simpler, resulting in better patient outcomes and reducing the overall cost of care.
Learn more about VISE by visiting www.vanderbilt.edu/vise and follow us on our social media channels:
Facebook: https://www.facebook.com/visevanderbilt
Instagram: https://www.instagram.com/visevanderbilt/
Twitter: https://twitter.com/ViseVanderbilt
YouTube: http://vanderbi.lt/viseyoutube
Leave a Reply
Recent Posts
 Perceptions of AIs, Humans, and Others (Part 2) » 5.28.19
Perceptions of AIs, Humans, and Others (Part 2) » 5.28.19- Perceptions of AIs, Humans, and Others (Part 1) » 5.23.19
- Esteemed Writer Ted Chiang visits Vanderbilt (Part 2) » 4.17.19
- Esteemed Writer Ted Chiang visits Vanderbilt (Part 1) » 4.15.19
- Sublating Binaries: Smart Vehicles as Defensive Drivers » 4.1.19
- Sublating Binaries and an Intelligent Vehicles Case Study » 3.28.19
 HPV Symposium Set For March 1 » 1.28.19
HPV Symposium Set For March 1 » 1.28.19