Swing-Assist Knee
The swing-assist knee is a variant of the “powered on passive” approach (see Powered on Passive project description for more background), although rather than provide full stance-knee extension powered capability, power is intended primarily to assist with swing phase. Specifically, the swing-assist knee relies on a passive hydraulic system to provide most stance and swing functionality, and uses power to provide “non-ballistic” swing phase movements, such as those used during the swing phase of stair ascent, during slow walking, and during stumble recovery.
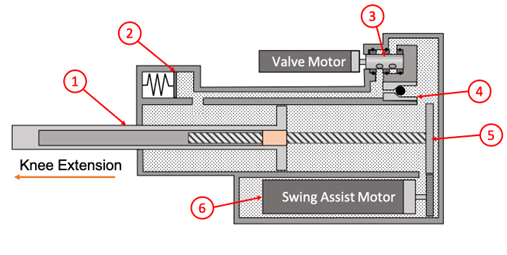
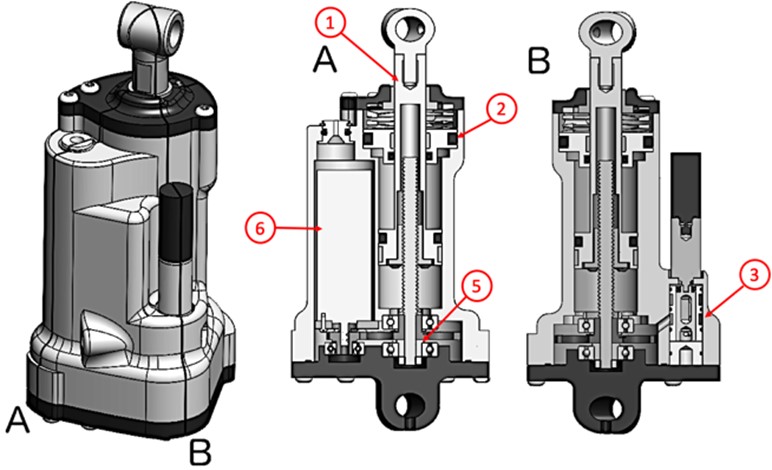
Schematic (top) and corresponding solid model (bottom) of hybrid actuator, including: (1) a single rod cylinder with lead screw contained within rod; (2) spring-loaded accumulator biased toward extension; (3) rotary spool valve; (4) check valve allows for low-resistance extension; (5) lead screw and gear train driven by (6) a brushless motor.
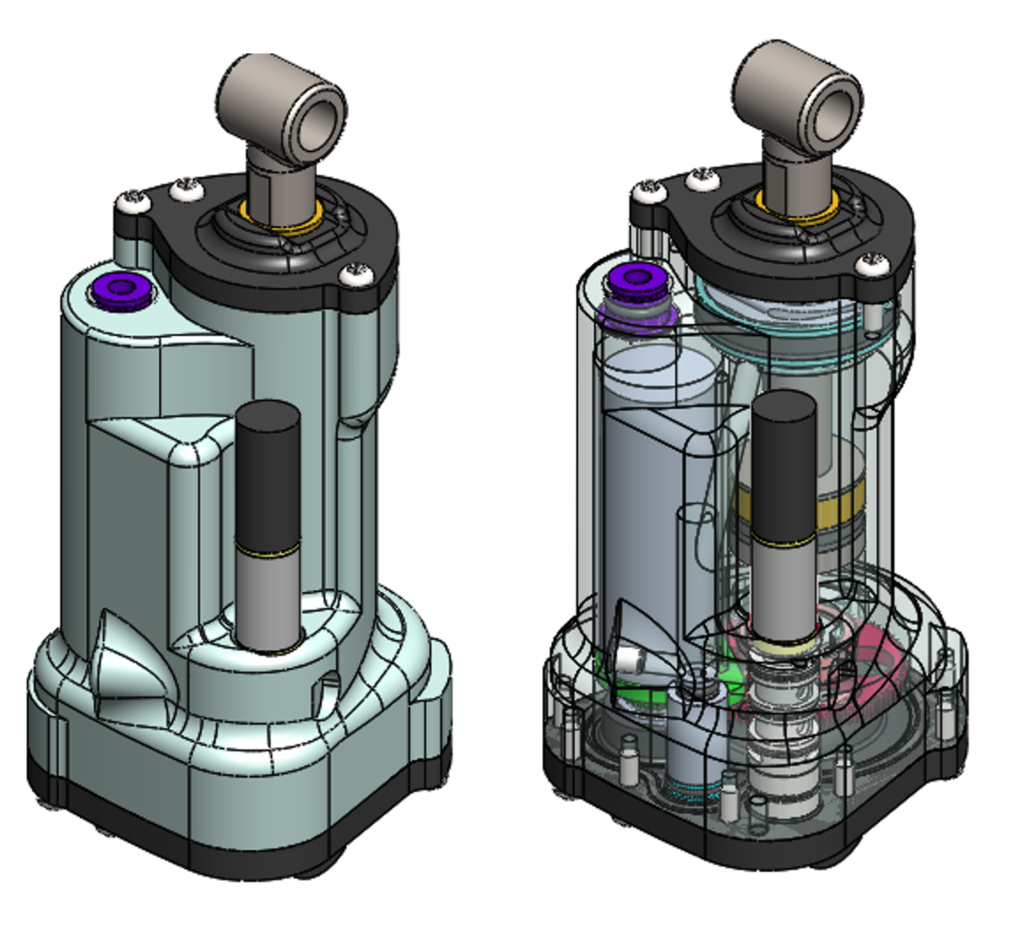
CAD model of swing-assist actuator
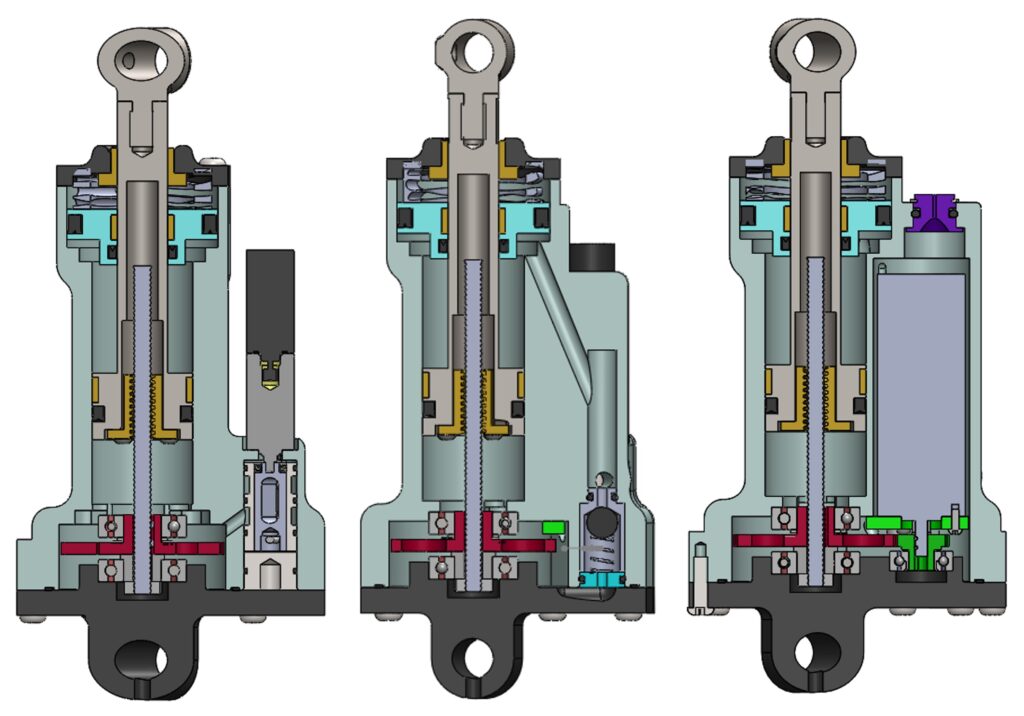
Cross-sections of swing-assist actuator showing sections through: servovalve (left); check valve (middle); and assist drive-system (right).
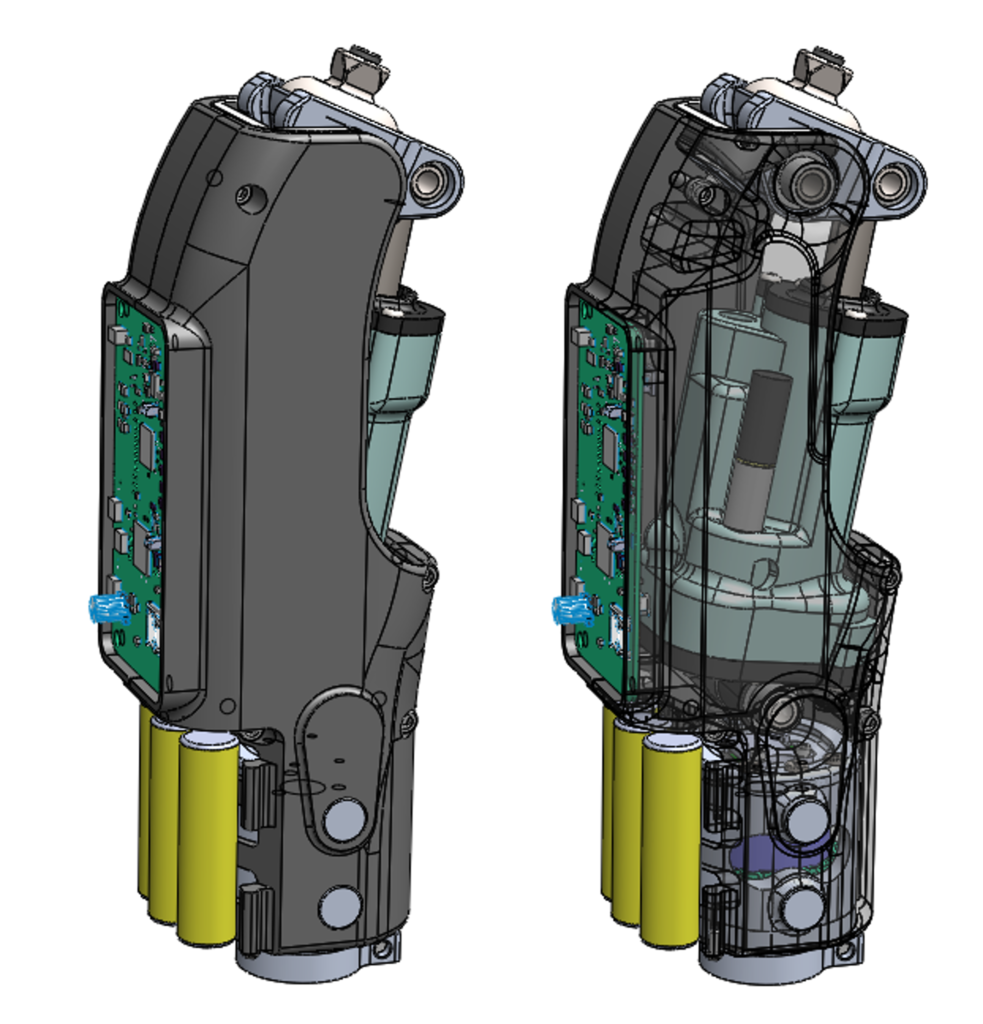
Swing-assist knee prototype
Embedded system for swing-assist knee
Early-swing stumble response
Late-swing stumble response
Demonstration of non-ballistic swing in stair ascent (and comparison to a passive MPK).
End of page