Upper Extremity Prostheses
We have conducted a considerable amount of research in transradial and transhumeral arm prostheses, and control methods for them. Among this work, we have developed several multigrasp hand designs that examine trade-offs in number of degrees-of-freedom and degrees-of-actuation, and how to couple the former into the latter in ways that balance dexterity and controllability. We have developed a number of control methods that coordinate measurement of movement and movement patterns with EMG to vastly improve control of movement for users of myoelectric multi-DOF arm prostheses.

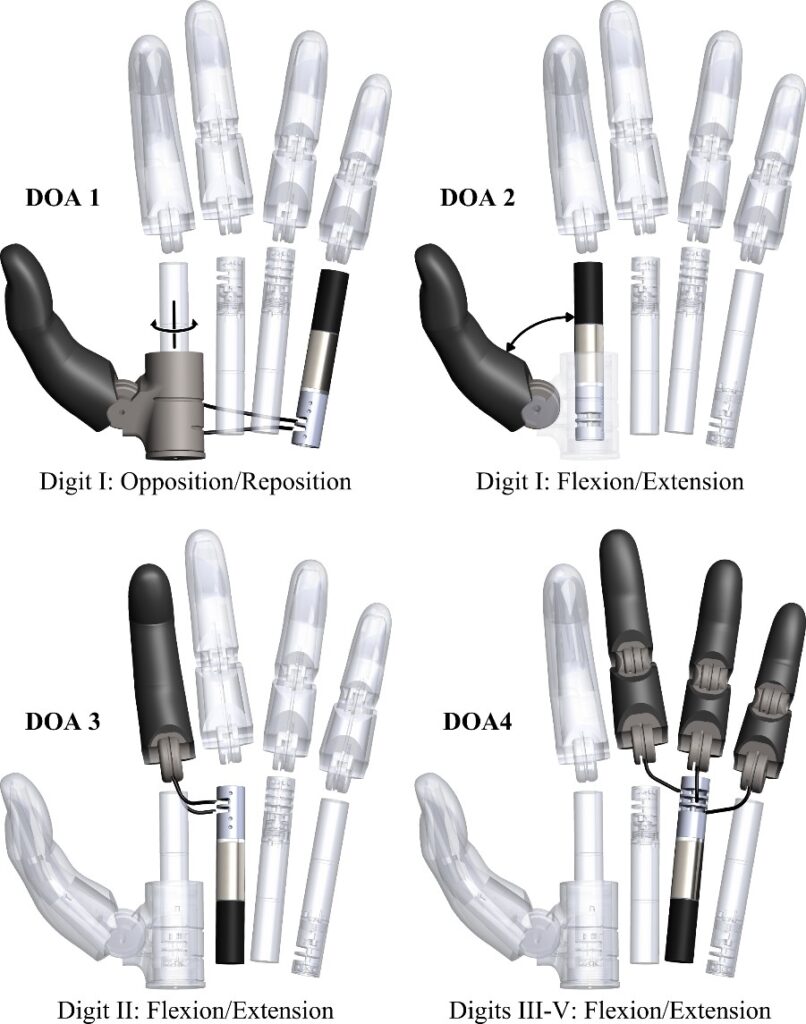
Mapping of degrees-of-actuation to degrees-of-freedom
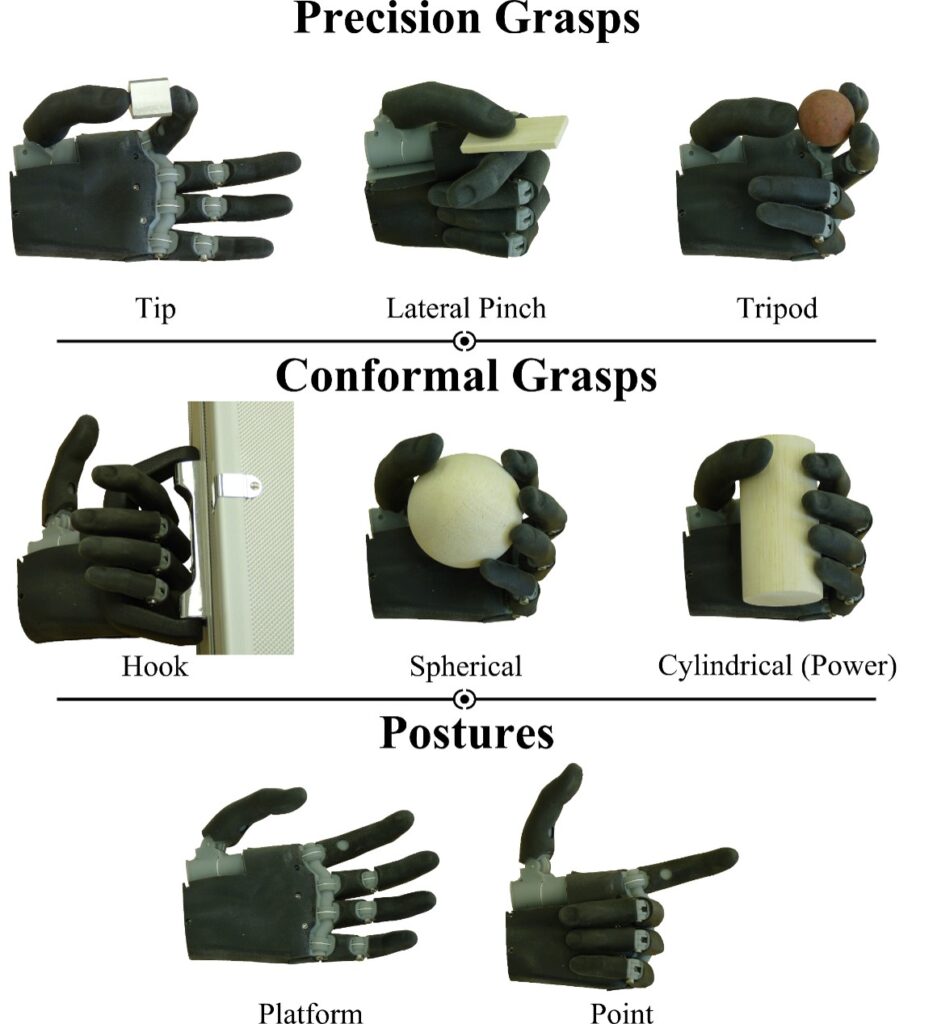
VMG grasp taxonomy
VMG movements
Multi-grasp myoelectric control
Assessment of functionality with Southampton Assessment Protocol
Vanderbilt transhumeral prosthesis