VU BreakThru

Home » Discovery Grants » A New Surgical Robot for Diagnosing and Treating Lung Cancer
A New Surgical Robot for Diagnosing and Treating Lung Cancer
Posted by anderc8 on Wednesday, November 8, 2017 in Discovery Grants, News, TIPs 2015.

Patrick Anderson, doctoral student, mechanical engineering
Written by Patrick Anderson, doctoral student, mechanical engineering
Is it possible to diagnose and treat lung tumors without making a single incision (using only needles)? This is the question we are attempting to answer in the Medical Engineering and Discovery (MED) Lab. Under the direction of mechanical engineering professor Robert Webster, we work with surgeons to develop new types of minimally invasive surgical robots. We are currently exploring a new paradigm for accessing lung tumors and using needles in surgery, and creating a new category of surgical robot in the process.
Our research is made possible thanks to a unique collaboration and a variety of funding opportunities. As a fellow in the Vanderbilt Institute for Surgery and Engineering (VISE) NIH Training Grant, I have taken multiple courses dedicated to learning about clinical needs and how to address them through engineering. I spent an entire semester watching multiple surgeries every week to better understand the challenges of diagnosing and treating lung cancer.
I have been directly mentored by assistant professor of medicine Fabien Maldonado, an interventional pulmonologist at VUMC who also participates in the VISE Surgeon-in-Residence program. Our collaboration with Dr. Maldonado laid the groundwork for funding through a VU Discovery Grant to develop new approaches to lung therapy.
Lung cancer is the deadliest form of cancer, killing more than 158,000 Americans annually. Early diagnosis and treatment is essential because the disease is easier to treat the earlier it’s detected: Stage I patients have an 88 percent 10-year survival rate, while Stage III or IV patients have a 15 percent 5-year survival rate. Better tools are needed to both diagnosis and treat. For example, percutaneous needle biopsy (a widely-used method of aiming and inserting a biopsy needle by hand through the ribs and into the lung) obtains a successful diagnosis in only half of early stage cases. For treatment, surgery usually gives patients the best chance of survival. However, only 25-33 percent of patients are candidates for surgery because they have comorbidities that make it too invasive. Our new robot addresses both of these issues.
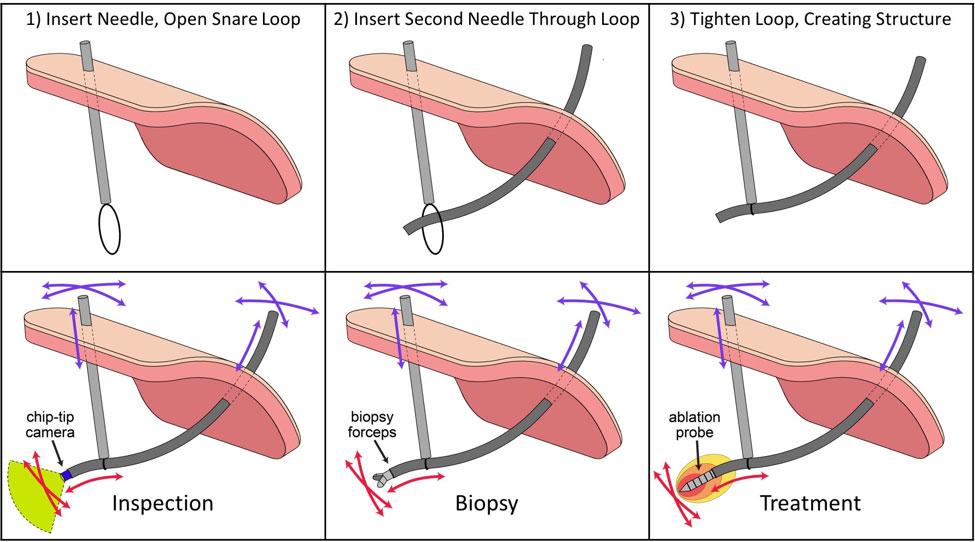
Figure 1: Top) Multi-needle structure assembly process. Bottom) Potential uses of multi-needle robot system in lung therapy.
Our robot consists of multiple, highly-flexible needles that are inserted into the chest through the ribs. These needles are only 1-2mm in diameter, so this insertion does not require incisions or sutures—they are no more invasive than getting a shot at the doctor’s office. We then connect the needles together inside the body using a wire loop called a snare (see Figure 1). Doing this enables us to assemble a flexible, controllable structure that can be moved around inside the chest cavity. The clinician sits at a console and uses a haptic device to control the tip of the structure, visually inspecting the chest cavity and then aiming the device at a target. Mathematical models calculate where the robot arms to move in order to control the tip of the flexible structure. The clinician only needs to think about where he/she wants to aim the needle; the robots perform the motions needed to accomplish the desired therapy tool motion (see Figure 2).
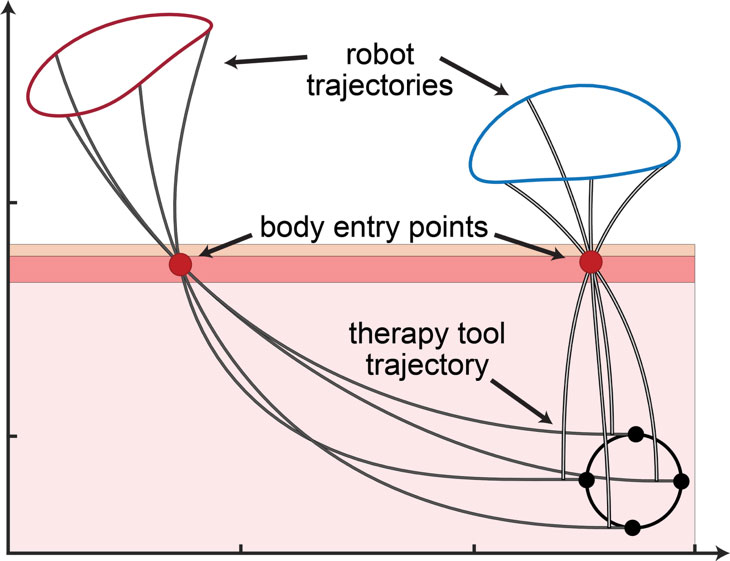
Figure 2: Demonstration of the “inverse kinematics” problem (i.e., determining how the robot arms need to move to achieve coordinated motion of the therapy tool inside the body).
Since the flexible needles are hollow, different tools can be administered to the target (e.g., a lung tumor). We have chip-tip cameras (just 1.6mm in diameter) that could be used to inspect the lung and inside of the chest wall. Biopsy needles, meanwhile, could be inserted once a target is found. Aiming the needle from inside rather than outside the chest may reduce errors that cause failed diagnosis.
An appealing alternative treatment option for lung cancer is thermal ablation, where a small probe is inserted into the tumor and produces heat to kill the cancerous tissue. Like biopsy needles, ablation probes are challenging to aim from outside the body. Our robotic system would also allow the clinician to ablate the tumor multiple times through the same body entry points. Ablating multiple times ensures that the entire tumor is killed, including a safety margin surrounding it.
I encourage you to leave questions or comments in the space provide below. And, feel free to stop by the MED Lab in Olin Hall 512 to learn more about surgical robotics and VISE research!
One Comment on “A New Surgical Robot for Diagnosing and Treating Lung Cancer”
angela jackson on July 17th, 2018 at 7:16 pm
I am supposed to have a biopsy of a lung nodule that is hard to reach I think under the scapula…..Is this an option that is available yet or still in the research phase?
Leave a Reply
Recent Posts
 Perceptions of AIs, Humans, and Others (Part 2) » 5.28.19
Perceptions of AIs, Humans, and Others (Part 2) » 5.28.19- Perceptions of AIs, Humans, and Others (Part 1) » 5.23.19
- Esteemed Writer Ted Chiang visits Vanderbilt (Part 2) » 4.17.19
- Esteemed Writer Ted Chiang visits Vanderbilt (Part 1) » 4.15.19
- Sublating Binaries: Smart Vehicles as Defensive Drivers » 4.1.19
- Sublating Binaries and an Intelligent Vehicles Case Study » 3.28.19
 HPV Symposium Set For March 1 » 1.28.19
HPV Symposium Set For March 1 » 1.28.19