
-
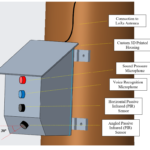
- Final prototype with sensor callouts, front view
-
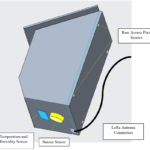
- Final prototype with sensor callouts, bottom view.
With our final prototype, the team has a total of six sensors in the device, four of which are used for the detection of human presence. There is also a microcontroller for data collection, a LoRa radio transceiver for data transmission, and an antenna to extend the range of the transceiver. Please click on the above photos to see where each component is on the device. Also, see below for an expanded description of these components, how they were configured onto the breadboard, and any results from testing the sensors*.
Adafruit Electrical Microphone Amplifier: The team used these to monitor sound level and frequency against the ambient background of the forest. A threshold ambient sound level was entered to which the input from the microphone is compared; while people are walking down a remote trail in the forest the sensor will note the increase in sound level compared to the user set level and will trigger an alert denoting a potential human presence.
Adafruit RFM95W LoRa Radio Transceivers: The team used these to transmit the data collected by the sensors back to a receiver. This particular transceiver was chosen because they operate at the standard 915 MHz frequency (which has no restrictions on frequency of use).
-
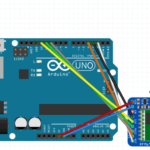
- Schematic of LoRa receiver configuration.
Arduino Humidity and Temperature Sensor and Arduino Hazardous Gas Sensor: The team used these sensors because they provided the most accurate and crucial ambient weather conditions.
-

- Particulate (smoke) sensor located near flaming pile of foliage.
Arduino Uno Microcontroller: The team used an Arduino Uno within the device. This allowed the team to integrate all the collected data onto one microcontroller, streamlining the data analysis and transmission processes and reducing the number of components within the device.
-
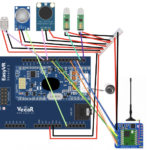
- Schematic of sensor node without battery.
Mini Infrared (PIR) Human Motion Sensor Detector: The team chose to use these PIR sensors because of their low current draw, small footprint, and accurate detection of human presence by monitoring changes in an environment’s heat signature. There are two of these sensors on the device. One is on the front of the device and the other is located on the angled bottom piece. The “top” PIR sensor is angled parallel to the ground and will detect objects around the average human shoulder height. The lower PIR sensor is angled 60 degrees from vertical and detects objects around the leg height of humans. If both sensors are tripped the likelihood of a false positive is lower than if they were implemented at the same height.
-
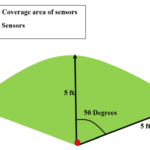
- Coverage area of PIR detection.
-
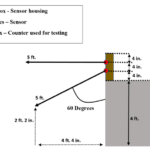
- Implementation orientation of PIR sensors.
Taoglas Antenna: The team used these antennas to achieve an acceptable data transmission range. In testing it was seen that the antenna has a transmission range of 2.1 miles.
-

- LoRa transmission range with obstructed field of view.
Spark Fun EasyVR Voice Recognition Module: The team used this module to strengthen the detection of human presence against false positives. In this application words representing the different vowel sounds of the American pronunciation of english phrases were programmed into the module, representing a majority of conversational English that might occur within the vicinity of the device.
-
- Configuration of sound level sensor with adjustable gain.
*Due to COVID-19, not every sensor was tested.